|
ARTICLES |
| |
| |
Encoder
|
|
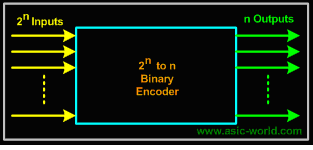
An
encoder is device used to change a signal
or data into code. An encoder is circuit
that converts binary information from 2n
input lines to n output lines. It is used
for compressing information for transmission
or storage, encrypting or adding redundancies
to the input code, or translating from one
code to another.
Usually only one of the
input is 1 and all others are zero. The
output is binary codeword corresponding
to the input that is 1. Since only one input
is 1 at a time only n rows are needed in
the truth table rather than 2n row. The
remaining rows contribute don’t care
condition. If more than one input is 1 at
a time, encoder will not produce valid output.
Only priority encoder allows more than one
of their inputs to be active. Each input
has a priority assigned to it. The code
word produced as the output corresponds
to that of the highest priority input among
all the inputs that are active.
|
| |
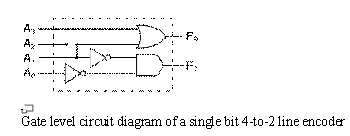
Single
bit 4 to 2 Encoder
|
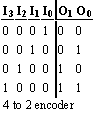
An encoder has
2n input lines and n output lines. The output
lines generate a binary code corresponding
to the input value. For example a single
bit 4 to 2 encoder takes in 4
bits and outputs 2 bits. It is assumed that
there are only 4 types of input signals
these are: 0001, 0010, 0100, and 1000.
|
| |
Priority
Encoder
|
A priority encoder
is a combinational circuit with m= 2n and
n outputs. Each of the m inputs is assigned
a priority. The most significant bit of
the input has the highest priority while
the least significant bit has the lowest
priority. The n bits of the output are the
binary index of the non-zero input bit with
highest priority, all input bits with lower
priority will be ignored. For example, when
n=2 and m=4, the behavior of the priority
encoder can be described as the following
truth table:
Priority encoders are typically used when
multiple components (e.g., processor, memory,
I/O devices, etc.) are to share a common
resource (e.g., a bus). Each component is
assigned a certain priority according to
its nature, so that whenever there is a
conflict, the component with the highest
priority will be granted the usage of the
resource.
A binary decoder can be used to convert
the n-bit output of a priority encoder to
a set of m=2n bits each for one of the m.
|
| |
Circuit
Description
|
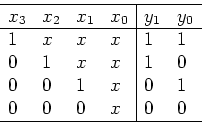
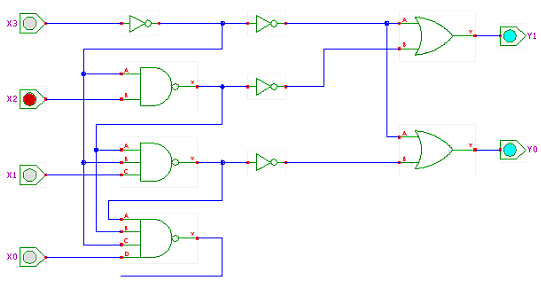
A 4-bit priority
encoder converts the 4-bit input into a
binary representation. If the input n is
active, all lower inputs (n-1 ... 0) are
ignored:
x3 x2 x1 x0 y1 y0
------------------
1 X X X 1 1
0 1 X X 1 0
0 0 1 X 0 1
0 0 0 X 0 0
The circuit operation is simple. Each output
is driven by an OR-gate which is connected
to the NAND-INV outputs of the corresponding
input lines. The NAND gate of each stage
receives its input bit, as well as the NAND
gate outputs of all higher priority stages.
This structure implies that an active input
on stage n effectively disables all lower
stages n-1... 0.
A common use of priority encoders is for
interrupt controllers, to select the most
critical out of multiple interrupt requests.
Due to electrical reasons (open collector
outputs), priority encoders with active-low
inputs are also often used in practice.
Application:
• Driving LED displays
• Driving incandescent displays
• Driving fluorescent displays
• Driving LCD displays
• Driving gas discharge displays
|
| |
Connecting
Priority Encoders
|
Priority encoders
can be easily connected in arrays to make
larger encoders, such as a 16 to 4 encoder
made from six 4 to 2 priority encoders (four
encoders having the signal source connected
to their inputs, and two encoders that take
the output of the first four as input).
|
| |
Rotary
encoder
|
A rotary encoder,
also called a shaft encoder, is an electro-mechanical
device used to convert the angular position
of a shaft or axle to an analog or digital
code, making it an angle transducer. These
devices are used in industrial controls,
robotics, in top-of-the-line photographic
lenses, in computer input devices (such
as optomechanical mouse and trackballs),
and in rotating radar platforms. A rotary
encoder converts rotary position to an analog
(e.g., analog quadrature) or digital (e.g.,
digital quadrature, 32-bit parallel, or
USB) electronic signal. Rotary Encoders
are ideal solutions for applications requiring
measurement of speed, length, travel, direction
of rotation etc. They are robustly constructed
to withstand the conditions encountered
in industry such as Printing, Packaging,
Metal Processing, Textile and Machine Tool.
There are two main types: absolute and incremental
(relative).
Absolute rotary encoder
Construction
The absolute digital type produces a unique
digital code for each distinct angle of
the shaft. They come in two basic types:
optical and mechanical.
Mechanical Absolute Encoders
A metal disc containing a set of concentric
rings of openings is affixed to an insulating
disc, which is rigidly fixed to the shaft.
A row of sliding contacts is fixed to a
stationary object so that each contact wipes
against the metal disc at a different distance
from the shaft. As the disc rotates with
the shaft, some of the contacts touch metal,
while others fall in the gaps where the
metal has been cut out. The metal sheet
is connected to a source of electric current,
and each contact is connected to a separate
electrical sensor. The metal pattern is
designed so that each possible position
of the axle creates a unique binary code
in which some of the contacts are connected
to the current source (i.e. switched on)
and others are not (i.e. switched off).
Optical Absolute Encoders
The optical encoder's disc is made of glass
with transparent and opaque areas. A light
source and photo detector array reads the
optical pattern that results from the disc's
position at any one time.
This code can be read by a controlling device,
such as a microprocessor, to determine the
angle of the shaft.
The absolute analog type produces a unique
dual analog code that can be translated
into an absolute angle of the shaft (by
using a special algorithm).
Incremental rotary encoder
An incremental rotary encoder, also known
as a quadrature encoder or a relative rotary
encoder, has two outputs called quadrature
outputs. They can be either mechanical or
optical. In the optical type there are two
gray coded tracks, while the mechanical
type has two contacts that are actuated
by cams on the rotating shaft. The mechanical
types require debouncing and are typically
used as digital potentiometers on equipment
including consumer devices. Most modern
home and car stereos use mechanical rotary
encoders for volume. Due to the fact the
mechanical switches require debouncing,
the mechanical type are limited in the rotational
speeds they can handle. The incremental
rotary encoder is the most widely used of
all rotary encoders due to its low cost.
Incremental encoders are used to track motion
and can be used to determine position and
velocity. This can be either linear or rotary
motion. Because the direction can be determined,
very accurate measurements can be made.
Rotary sensors with a single output are
not encoders and cannot sense direction,
but can sense RPM. They are thus called
tachometer sensors.
|
| |
Sine
wave encoder
A variation on the Incremental encoder is
the Sine wave Encoder. Instead of producing
two quadrature square waves, the outputs
are quadrature sine waves (a Sine and a
Cosine). By performing the arctangent function,
arbitrary levels of resolution can be achieved.
Linear encoder
A linear encoder is a sensor, paired with
a scale that encodes position. The sensor
reads the scale in order to convert the
encoded position into an analog or digital
signal, which can then be decoded into position
by a digital readout (DRO). Motion can be
determined by change in position over time.
Linear encoder technologies include capacitive,
inductive, eddy current, magnetic, and optical.
Optical technologies include shadow, self
imaging and interferometric. Linear encoders
are used in metrology instruments and high
precision machining tools ranging from digital
calipers to coordinate measuring machines.
A linear encoder similarly converts linear
position to an electronic signal.
|
Resolutions
|
Resolutions
is a measure of how many counts per unit
distance encoder generates. With rotary
encoder, resolution is expressed in either
in unit of angle(degrees- minutes- second,
decimal degrees, grad or radians) or number
of measuring steps per resolutions.
|
Accuracy
|
Accuracy is
measure of where the encoder says vs. where
it actually is. It is expressed in unit
of angle.
|
Encoder
technologies
|
Encoders may
be implemented using a variety of technologies:
• Conductive tracks: A series of copper
pads etched onto a PCB is used to encode
the information. Contact brushes sense the
conductive areas. This form of encoder is
now rarely seen.
• Optical: This uses a light shining
onto a photodiode through slits in a metal
or glass disc. Reflective versions also
exist. This is one of the most common technologies.
• Magnetic: Strips of magnetised material
are placed on the rotating disc and are
sensed by a Hall-effect sensor or magnetoresistive
sensor. Hall effect sensors are also used
to sense gear teeth directly, without the
need for a separate encoder disc.
|
| |
Interface
technology
|
Parallel
Interface:
In Parallel Interface all bits of a position
are transferred simultaneously using one
line for each bit. Data transmission is
done by two transistors in push pull circuit.
The bit parallel interface is a very fast
and for low resolutions cheap possibility
of data transmission. For high resolutions
or machines of bigger size installation
costs can rise rapidly so that other methods
of data transmission are more favorable.
SSI:
The position value is transmitted synchronously
to the clock signal of the control system
starting with the most significant bit (MSB).
When non-operational the clock as well as
the data line is high. As soon as the clock
signal of a clock sequence changes for the
first time from high (H) to low (L), the
bit-parallel data on the parallel-serial-converter
will be stored via an internal S Load-Signal
in the input latch of the shift register.
This ensures that the data cannot change
during the transmission of a position value.
With the following rising edge transition
of the clock signal the transmission begins
with the most significant bit (MSB). With
each following rising edge transition of
the clock signal, the next lower significant
bit is set on the output of the data line.
After the least significant bit was shifted
out, the last rising edge transition of
the clock signal switches the data line
to low (transmission end). |
| |
|
| |
|
|
|
 |
|
|
|









